Line Following Robot

Project Description
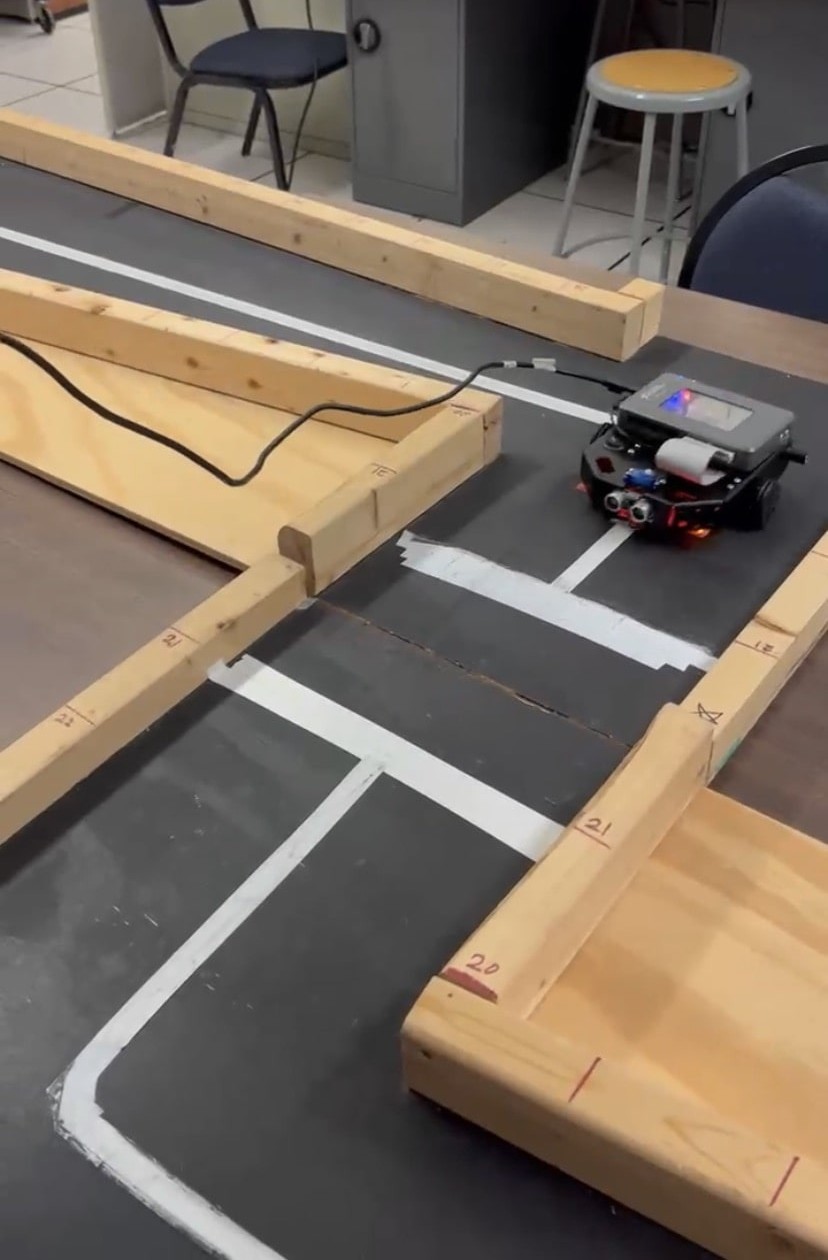
In this project, my team and I built and programmed a fully automated two-wheeled robot that accomplishes “line following” and “herding” behaviors by using infrared (IR) and ultrasonic sensors. The robot was assembled with a Skitter robot kit and controlled by a myRIO device programmed by a LabVIEW algorithm.
The first task was to construct the robot and perform several tests and controller design calculations to obtain its custom closed-loop controller. Then, the behavior of the sensors was studied to later apply its functionality properly. Finally, a state machine was developed and coded with different cases for the robot to be able to initially use the IR sensors to follow the line and at the end, switch to herding where the ultrasonic sensors will be used staying at a set distance away from an object.
We entered the Mechanical Engineering System Modeling and Analysis course competition, and placed third place.
Media
Reports
Open the full project report by clicking: